ACC Workshop on Differentiable Programming for Modeling and Control of Dynamical Systems
- Date: May 30, 2023
- Venue: Hilton San Diego Bayfront Hotel in San Diego, CA, USA
- Room: Aqua 313
- Register here
In recent years there has been an explosion of research on the intersection of machine learning and classical engineering domains. For example, machine learning is increasingly being used to develop novel data-driven approaches for the modeling and control of dynamical systems, traditionally dominated by physics-based models and scientific computing solvers. On the other hand, engineering and scientific computing principles are changing the machine learning landscape from purely black-box into domain-aware methods by incorporating more structure and prior knowledge into their model architectures and loss functions.
Differentiable Programming has emerged as a leading paradigm for systematically integrating converging domains of machine learning and scientific computing based on a shared infrastructure that is built on the automatic differentiation of complex computer programs. It has ushered in a new epoch in scientific machine learning with structured domain-aware model architectures, signaling a paradigm shift away from over-parametrized black-box deep neural models. This has spurred the development of software tools and algorithms to construct differentiable programs for both general and specific tasks to achieve:
- Surrogate modeling via systematic combination of black-box function approximators such as deep neural networks with physics-based equations.
- Expressive functions that incorporate structure and priors of the problem to make the learning process more robust and data efficient.
- Analysis of data-driven models by leveraging classical numerical methods.
- New architectures to advance machine learning capabilities, such as modeling physical systems with guarantees and generating safe control actions.
- Differentiable physics simulators allowing for solution of inverse modeling and optimal control problems.
This workshop brings together pioneers and leaders in this emerging area of differentiable programming to gather their perspectives on nonlinear dynamical systems modeling, constrained optimization, and control. Our intention is to build synergy between research teams working on the theory, tools, and algorithms in this area for different applications, including buildings, energy systems, climate models, healthcare, robotics, and vision, to name a few. Furthermore, we hope the talks pique further interest in this topic leading to exciting new research directions and wider adoption of domain-aware differentiable architectures.
We believe the workshop will be of great interest to:
- Deep learning researchers seeking to model and control physical systems with end-to-end differentiable components.
- Students exploring the practical applications of differentiable programs for learning and control.
- Practitioners interested in benchmarking differentiable environments, software libraries, and deep learning programming practices for dynamical systems and control applications.
Schedule
08:30 am - 09:00 am - Sonja Glavaski (PNNL): Opening remarks and overview of differentiable programming
9:00 am - 9:30 am - Boris Ivanovic (NVIDIA): Differentiable robotics
09:30 am - 10:00 am - Biswadip Dey (Siemens Technology): Learning Hamiltonian dynamics with control
10:00 am - 10:30 am - Coffee break
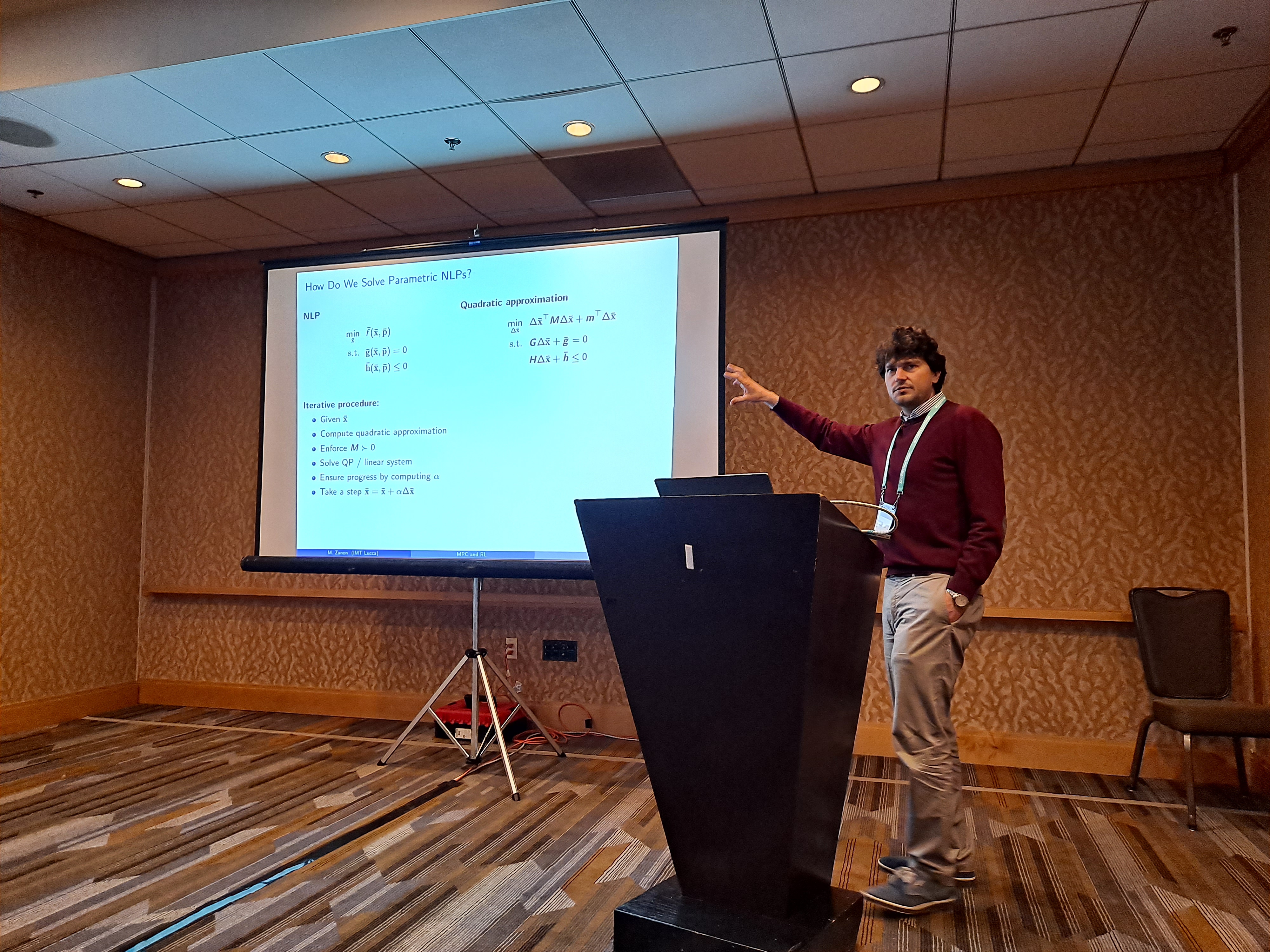
10:30 am - 11:00 am - Mario Zanon (IMT Lucca): Differentiating MPC with applications in Reinforcement Learning
11:00 am - 11:30 am - Bingqing Chen (Bosch Center for AI): Towards safe and sample-efficient autonomous energy systems via differentiable programming
11:30 pm - 1:00 pm - Lunch Break
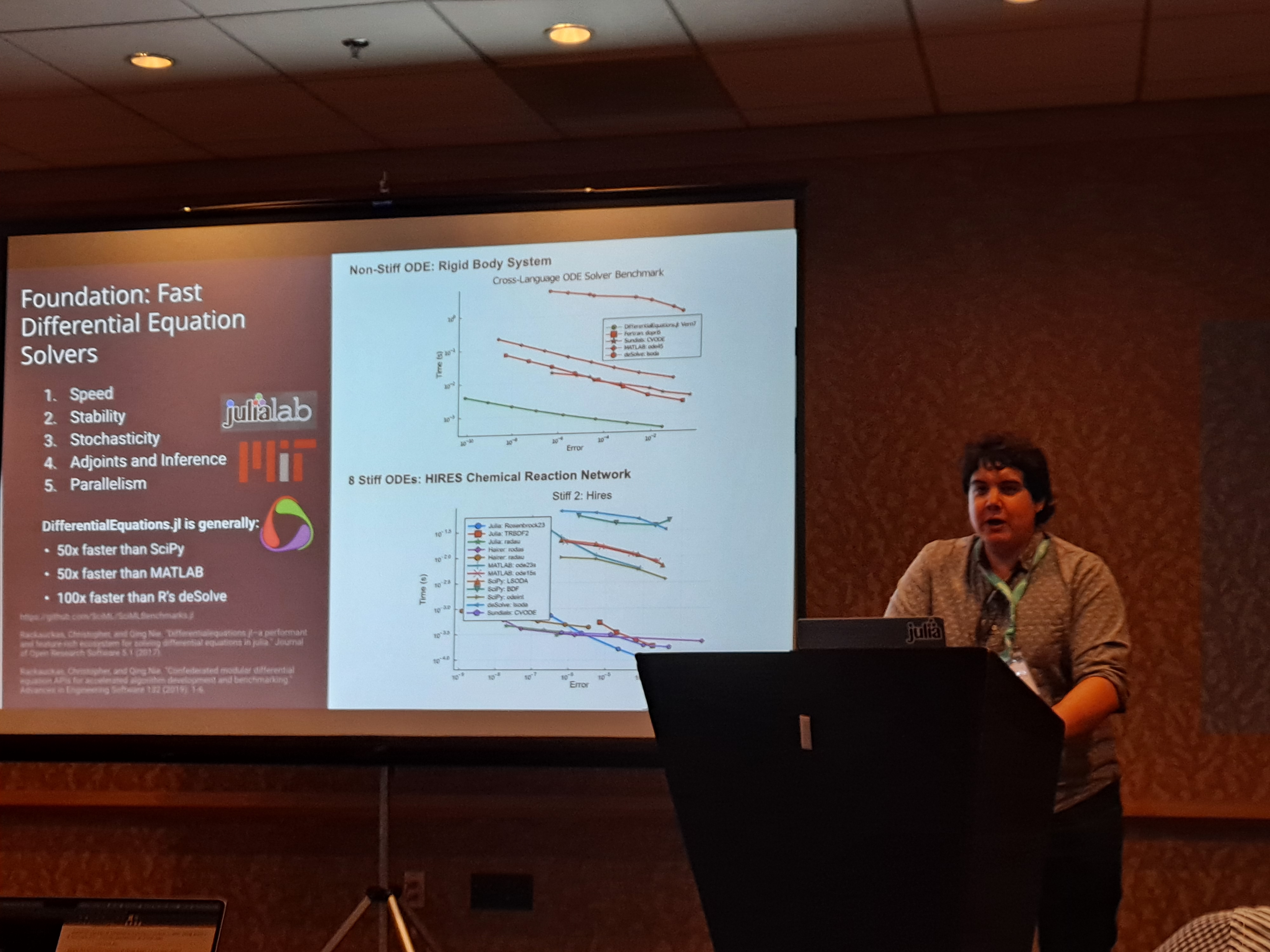
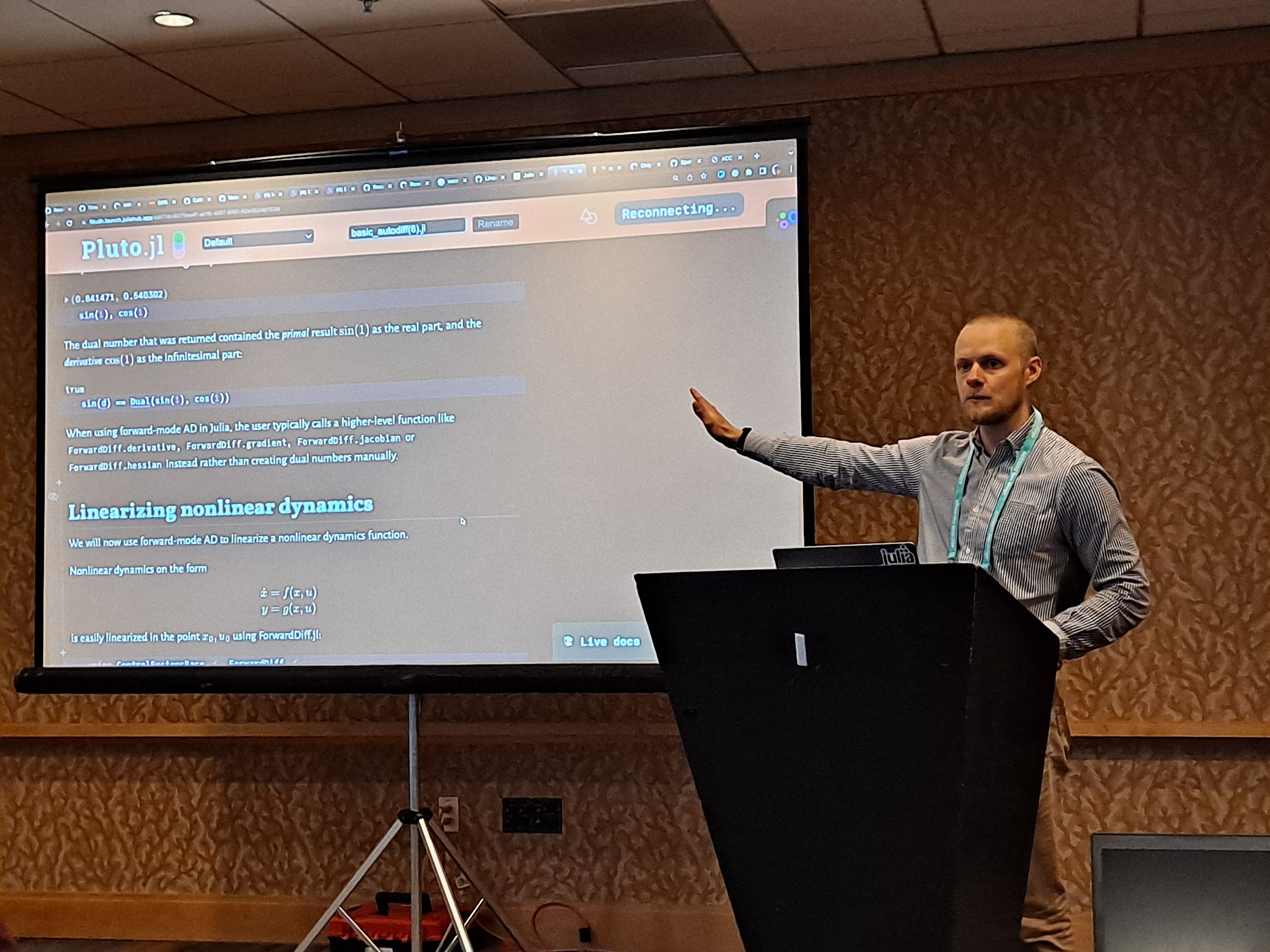
1:00 pm - 2:00 pm - Chris Rackauckas (JuliaHub) + Fredrik Bagge Carlson (JuliaHub): Code tutorial 1: Julia
2:00 pm - 3:00 pm - Aaron Tuor (PNNL): Code tutorial 2: PyTorch
3:00 pm - 3:30 pm - Coffee break
3:30 pm - 5:00 pm - Jan Drgona (PNNL): Code tutorial 3: PyTorch
Speakers
- Chris Rackauckas (MIT, JuliaHub)
- Fredrik Bagge Carlson (JuliaHub)
- Boris Ivanovic (NVIDIA)
- Mario Zanon (IMT Lucca)
- Bingqing Chen (Bosch Center for AI)
- Biswadip Dey (Siemens Technology)
- Jan Drgona (PNNL)
- Aaron Tuor (PNNL)
- Draguna Vrabie (PNNL)
Workshop slides
Slides for Sonja Glavaski’s talk.
Slides for Bingquing Chen’s talk.
Slides for Boris Ivanovic’s talk.
Slides for Mario Zanon’s talk.
Slides for Biswadip Dey’s talk.
Slides for Jan Drgona’s talk.
Open-source code
NeuroMANCER: Pytorch-based framework for solving parametric constrained optimization problems, physics-informed system identification, and parametric model predictive control.
Colab examples:
-
Learning to solve parametric constrained optimization problems with differentiable programming

-
Model-based differentiable predictive control (DPC)
-
Data-driven differentiable predictive control (DPC)
JuliaHub: differentiable control design and control systems demo in Julia.
Organizers
- Jan Drgona (PNNL)
- Aaron Tuor (PNNL)
- Biswadip Dey (Siemens Technology)
- Wenceslao Shaw Cortez (PNNL)
- Soumya Vasisht (PNNL)
- Draguna Vrabie (PNNL)
Workshop photos